Microbit
Robotics & Engineering
Teacher Training
Beginner
15 mins
Teacher/Student led
+75 XP
 Chromebooks, laptops, and PCs are crucial tools for coding and digital skills education. Chromebooks are ideal for web-based applications and collaborative projects, while laptops and PCs support a wider range of programming environments and software for more intensive tasks like software development and data analysis.
Chromebooks, laptops, and PCs are crucial tools for coding and digital skills education. Chromebooks are ideal for web-based applications and collaborative projects, while laptops and PCs support a wider range of programming environments and software for more intensive tasks like software development and data analysis.Sonar
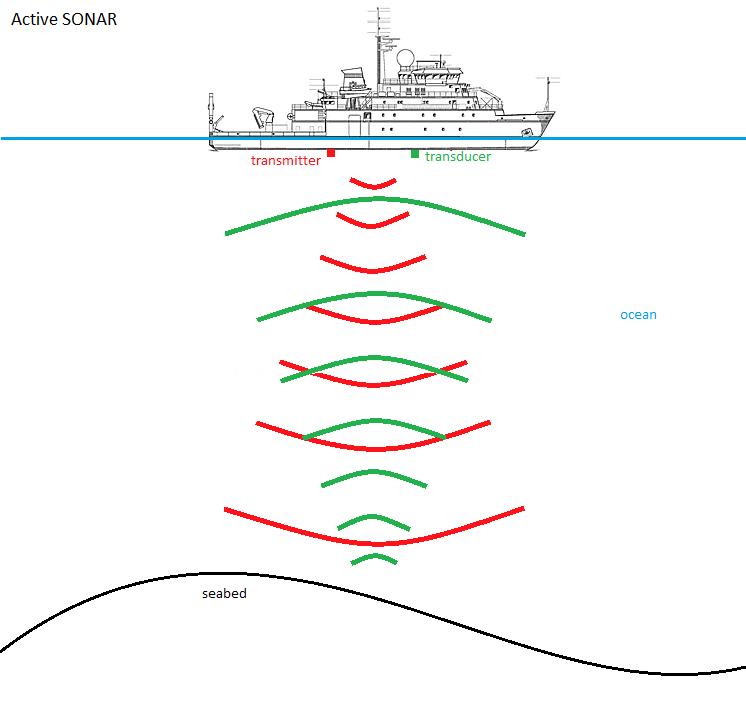
In this lesson, you will learn about the concept of sonar, how it functions, and its usage in robotics. You will also see how a microbit can sense distance using sonar.